驱动和传感器说明-指南针传感器
说明
指南针传感器(图 1)用于获取方向,返回其前方(指南针上标有“N”(北方)的方向)与场景的正北(+Z轴)方向的夹角,返回值为0~359度。
指南针传感器常用于使机器人转到某个方向,或使机器人沿某个方向行进。
使用指南针传感器时需要水平安装,且指针面朝上,否则可能无法正常工作。

相关编程模块
与指南针传感器相关的编程模块有“侦测”类中的“指南针”模块(图 2),此模块获取指南针传感器的返回值,其返回值为整型。模块为容器内模块,不能连接,可放置到赋值、逻辑类的关系表达式、运算类等模块容器内,在属性面板中选择要获取返回值的指南针传感器。

实例
此实例使机器人由开始时的朝向0度转到90度,仿真开始后机器人向左转,当到达90度时停止转动。
仿真时,由于惯性的存在,机器人会在超过90度时停止,与旋转时的速度有关。
机器人——“机器人-实例-指南针传感器”
控制程序——“程序-实例-指南针传感器”
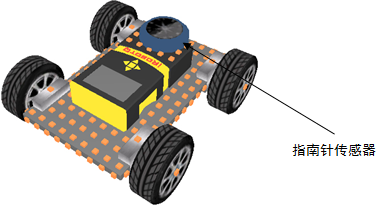
实例机器人
“机器人-实例-指南针传感器”的机器人如图 3所示,上方靠后的位置水平安装1个指南针传感器,端口设为31。
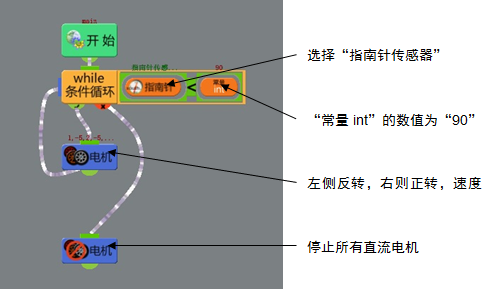
实例程序
“程序-实例-指南针传感器”流程及设置如图 4所示。