资源管理用户手册-资源管理操作
在离线模式下单击“资源管理”,进入资源管理,见图 1。在此窗口中可对场景、机器人、程序和仿真包中“我的作品”进行管理。
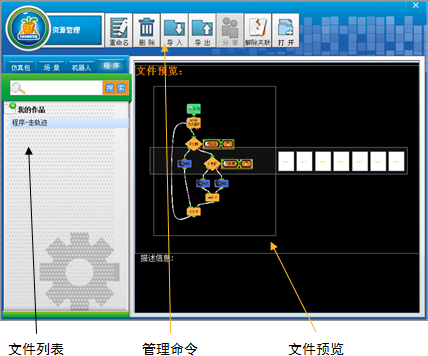
文件列表:列出用户的“仿真包”、“场景”、“机器人”和“程序”中所有文件;
管理命令:显示了资源管理中所有命令;
文件预览:显示选择的文件的预览,或仿真包的检测报告;
资源管理窗口中选择不同的文件时可用的管理命令如表格 1所示。
| 重命名 | 删除 | 导入 | 导出 | 解除关联 | 打开 | |
|---|---|---|---|---|---|---|
| 仿真包 | ● | ● | × | × | × | ● |
| 场景-官方作品 | × | × | × | × | × | × |
| 场景-我的作品 | ● | ● | ● | ● | × | ● |
| 机器人 | ● | ● | ● | ● | × | ● |
| 程序 | ● | ● | ● | ● | ● | ● |
● 表示此功能在选择某个文件时可用;× 表示此功能在选择某个文件时不可用;
重命名
要对文件或仿真包进行重命名,按以下步骤操作:
1. 在文件列表中选择要重命名的文件或仿真包;
2. 单击管理命令中的“重命名”按钮;
3. 在弹出窗口中输入新的文件名,单击“确定”;
重命名时输入的新文件名如果已存在,会提示存在该文件,需要重新输入,此时的重命名操作自动结束,按上述步骤重新操作,输入新的文件名。
删除
要删除文件或仿真包,按以下步骤操作:
1. 在文件列表中选择要删除的文件或仿真包;
2. 单击管理命令中的“删除”按钮;
3. 在确定删除提示中单击“确定”;
删除文件或仿真包不能恢复,请谨慎操作!
导入
导入功能可将官方发布或其它用户的文件导入到用户账号中使用。要导入文件,按以下步骤操作:
1. 单击管理命令中的“导入”命令,出现“资源导入”窗口,如图 2所示;
2. 在“选择导入文件”列表中选择计算机中可导入的文件,选择时可按住“Ctrl”键多选,并查看文件信息,确定是需要导入的文件;
3. 如果资源在导出时设置了密码,在“资源密码”中输入相同的密码;
4. 选择与确认完毕后,单击“确定”,文件即被导入到账户中,导入完成后自动关闭“资源导入”窗口。
导入文件时应注意以下事项:
导入文件时,无须切换到要导入的文件列表。导入时会自动根据导入文件类型放入到不同的列表中。
按住“Ctrl”键多选时,可以选不同类型的文件。
导入时,账户中已存在相同类型、相同名称的文件时,软件提示此文件已存在,需要为导入的文件输入新的文件名,输入完毕后,单击“确定”

导出
可将账户中的“我的作品”中的“场景”、“机器人”、“程序”导出成计算机文件,用于备份或与其他用户分享。要导出文件按以下步骤操作:
1. 在文件列表中选择要导出的文件;
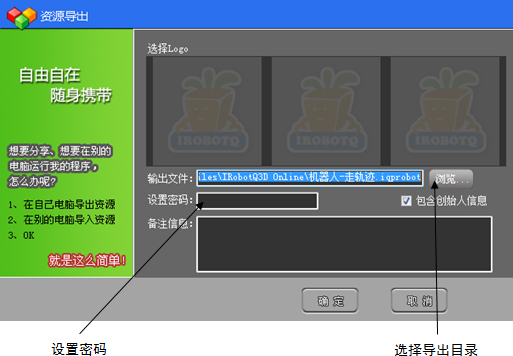
2. 单击管理命令中的“导出”命令,出现“资源导出”窗口,如图 3所示;
3. 单击“浏览…”选择导出目录;
4. 如有必要,在“设置密码”中输入导出文件的密码;在“备注信息”中输入此文件的备注信息;
5. 设置完毕后,单击“确定”,文件导出到指定的目录,“资源导出”窗口自动关闭;
| 图标 | 扩展名 | |
|---|---|---|
| 场景 |  |
iqpscene |
| 机器人 |  |
iqprobot |
| 控制程序 |  |
iqpvpl |
解除关联
“解除关联”仅对控制程序文件有效。
萝卜圈仿真中,在新建控制程序时需要选择关联的机器人,需要将控制程序与另一个机器人关联时,可以使用“解除关联”功能取消控制程序与原机器人的关联。
要解除控制程序与机器人的关联,按以下步骤操作:
1. 切换到“程序”列表,选择要解除关联的控制程序;
2. 单击管理命令中的“解除关联”命令;
3. 在弹出的“取消VPL关联”窗口,单击“确定”,控制程序即与机器人解除关联;
在程序编辑器中打开已解除关联的控制程序时,会提示没有对应的机器人,需要重新选择,单击“确定”,出现“选择机器人”窗口,在机器人列表中重新选择一个机器人,并单击“确定”,选择的机器人与控制程序建立关联。
控制程序关联的机器人被重命名或删除后,打开控制程序会提示没有对应的机器人,需要重新选择。
打开
可以在“资源管理”中直接打开文件或进入仿真。
要打开文件,按以下步骤操作:
1. 在文件列表中选择要打开的文件;
2. 在管理命令上单击“打开”命令;
3. 在确认“打开”窗口中单击“确定”,自动调用合适的编辑器打开选择的文件;
要进入仿真,按以下步骤操作:
1. 在仿真包列表中选择要进入的仿真包;
2. 在管理命令上单击“打开”命令;
3. 在确认“打开”窗口中单击“确定”,进入仿真包的“准备完毕”窗口;
4. 如未提示仿真包缺少文件,单击“准备完毕”进入仿真;