搭建机器人-介绍
欢迎使用“萝卜圈三维机器人在线仿真平台”(以下简称“萝卜圈仿真”),此手册详细介绍了平台中关于“构建机器人”的相关内容、操作方法和注意事项,阅读此手册能深入地了解“萝卜圈仿真”的机器人编辑器的功能和特性,掌握构建机器人的方法和技巧。
文档约定
左键/右键:指鼠标的左键或右键;
单击左键/单击右键:指按下鼠标左键/右键,并松开的过程
拖动左键/拖动右键:指按下鼠标左键/右键并保持,并移动鼠标,移动到某种目的后松开左键/右键。
“文件”>“新建”:以“>”分隔的操作表示先单击“文件”菜单(或面板),再单击菜单(或面板)中的命令(或按钮)。粗体的“文件”、“新建”表示窗口上的命令或按钮。
操作区别
编号:以编号开始的内容应按顺序操作以完成一个完整的功能,示例:
1. 操作步骤1
2. 操作步骤2
项目符号:以项目符号开始的内容表示几种操作完成同样的功能,在使用时可选择任意一种或多种方法混合使用,示例:
● 操作方法1
● 操作方法2
术语解释
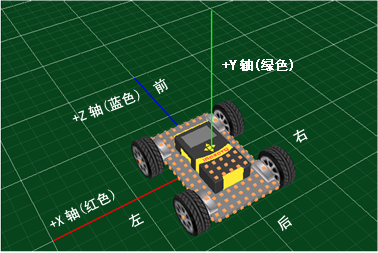
坐标系统:萝卜圈仿真采用的坐标系统如图 1所示,红、绿、蓝色线条分别表示X、Y、Z轴的正方向,XZ平面为水平面。
前方:模型的前方是指模型在添加到编辑区时,未经任何旋转时,朝向+Z轴(蓝色)的方向为前方(见图 1)。
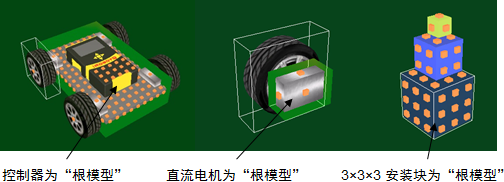
模型组合:指某些模型通过安装操作组合在一起的多个模型。安装有其它模型的控制器也可看作是一种模型组合;
根模型:模型组合中,仅接受了其它模型的安装,而没有安装到其它模型上的模型是“根模型”。每个组合中只有1个根模型,机器人中的控制器是根模型。选中某模型组合中的任意一个模型,某个模型的四周出现绿色透明的包围框时,此模型为根模型;都没出现绿色透明包围框时,选中的模型为根模型,如图 2。