搭建机器人-属性设置
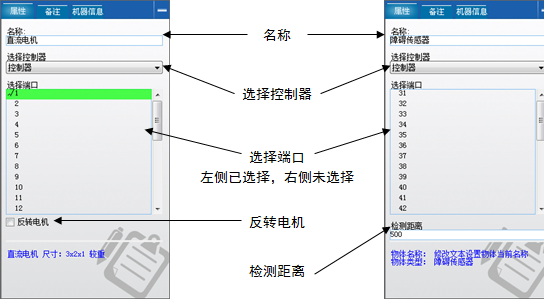
机器人编辑器中需要设置直流电机、伺服电机、传感器模型的属性,使之可以在编程时被识别和使用,选择模型后,在属性面板中进行修改和设置属性。模型共有“名称”、“选择控制器”、“选择端口”、“反转电机”和“检测距离”5种属性,见图 1。
名称
所有模型都有“名称”属性,模型在添加到编辑区时会自动命名唯一的名称——基本名称加序号,可以修改其名称,便于在编写控制程序时识别模型。
在属性面板的“名称”下方的文本框中修改或输入新的名称,鼠标在编辑区内单击一次即生效。名称不能重名,当提示“某名称是无效的名称,该名称已经存在!”时,名称的修改被复原。
机器人上安装多个同类型直流电机、伺服电机、传感器时,将这些模型的名称修改成有意义且可明显区分的名称非常有必要,在编写控制程序有助于明确选择使用哪个直流电机、伺服电机或传感器。如机器人上安装3个距离传感器,可分别命名为“距离传感器_左”、“距离传感器_中”、“距离传感器_右”,在图形化编程中显示对应的名称,便于选择。
选择控制器
“选择控制器”是直流电机、伺服电机、传感器的专有属性。这些模型需要为其分配端口,由于萝卜圈仿真可以同时编辑多个机器人,因此需要明确选择从哪个控制器上分配。
在属性面板的“选择控制器”下方的下接列表中选择已添加到编辑区的控制器。此选项会自动选择新建后第一个放入编辑区或编辑区内唯一的控制器,因此只编辑一个机器人时,此选项不用手动选择。
选择端口
“选择端口”是直流电机、伺服电机、传感器的专有属性。这些模型需要分配唯一的端口,在编写控制程序时才可驱动或使用这些模型。
每类模型的端口范围分配如表格 1:
| 类型 | 端口范围 |
|---|---|
| 直流电机 | 1 ~ 30 |
| 传感器 | 31 ~ 60 |
| 伺服电机 | 90 ~ 120 |
为直流电机、伺服电机、传感器模型分配端口,按以下步骤操作:
1. 选择要分配端口的模型;
2. 在其属性面板的“选择端口”列中选择一个端口,选中的端口显示绿色背景,在端口前有“√”符号。
无需担心一个端口分配给多个模型,已被分配的端口号不会出现在列表中。
检测距离
“检测距离”是障碍传感器的专有属性,用于设置障碍传感器的检测距离。
选择要设置的障碍传感器,在属性面板中的“检测距离”中输入要设置的检测距离数值。障碍传感器的默认检测距离为500,有效检测距离为1~500。输入的检测距离超出有效检测距离时,自动设为最大检测距离500。
障碍传感器检测距离的设置也可以在控制程序中使用“驱动”类中的“传感器设置”和“简便传感器设置”进行设置。
更多关于障碍传感器及其设置可参阅“萝卜圈仿真 – 驱动和传感器说明”中的“第六章 障碍传感器”的内容。
反转电机
“反转电机”是直流电机的专有属性,直流电机在设置为“反转电机”时,实际的转向与控制程序中设置的转向相反。
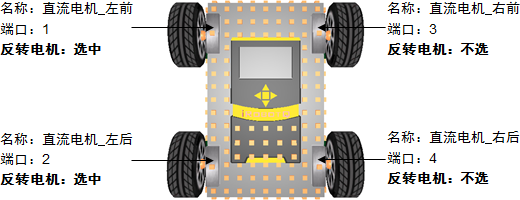
如图 2所示的机器人,4轮结构,左、右两侧的直流电机中心对称安装,控制程序中设置4个直流电机均为正转使机器人前进时有2种情况:
直流电机都不设置“反转电机”:因为左右两侧的直流电机是中心对称安装的,所以右侧直流电机正转带动机身右侧前进,而左侧直流电机正转带动机器人左侧后退,整体表现为机器人原地左转。
左侧2个直流电机设置为“反转电机”:右侧直流电机正转带动机身右侧前进,左侧直流电机反转带动机器人左侧前进,整体表现为机器人前进。
正/反转:从直流电机内部向轮子方向看去,轮子沿输出轴逆时针转动为正转,顺时针转动为反转。
要设置直流电机为“反转电机”按以方式操作:
● 选择要设置的直流电机;
● 勾选属性面板的“反转电机”选框,设置此直流电机为反转电机。
通常情况下,4轮驱动的机器人将左侧2个直流电机设为“反转电机”,图 2是典型的4轮机器人直流电机设置。