仿真操作用户手册-仿真操作
离线或在线单人任务时,需要用户单击“开始”按钮开始仿真。
在线多人任务时,进入仿真后自动开始,用户不能控制暂停/停止/复位。
仿真窗口的布局如图 1所示。
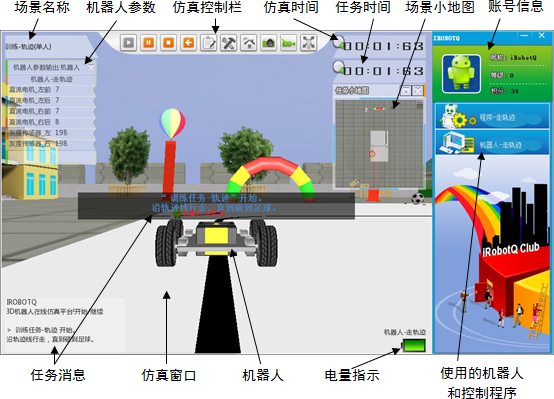
场景名称:显示仿真时选择的任务场景名称;
机器人参数:显示仿真时机器人部件的参数,如直流电机转速,传感器检测值等;
仿真控制栏:仿真控制栏集中了仿真控制的操作命令;
仿真时间:进入仿真后,从第一次开始仿真到现在的时间;
任务时间:本次仿真任务开始后经过的时间;
场景小地图:显示任务小地图,及机器人和相机的位置和朝向;
账号信息:显示账号的等级、积分等信息;
任务消息:显示与任务相关的信息,如任务提示,得到的分数,失败的原因等;
仿真窗口:机器人仿真的画面;
机器人:选择的机器人在任务场景中的运行状况,跟随机器人顶部的图像是用户的头像,红色的文字是用户昵称;
电量指示:显示各机器人的电量指量,当电量耗尽时,机器人不能再运行,复位后电量复原;
使用的机器人和控制程序:显示仿真时选择的机器人和控制程序的名称;
仿真控制栏
仿真的控制命令位于仿真控制栏,其各个按钮的作用如下表所示。
| 图标 | 名称 | 作用 | 说明 | 离线 | 在线单人 | 在线多人 |
|---|---|---|---|---|---|---|
 |
开始 | 开始仿真 | ● | ● | × | |
 |
暂停 | 暂停仿真 | 单击“开始”可继续 | ● | ● | × |
 |
停止 | 停止仿真 | 不可继续 | ● | ● | × |
 |
复位 | 场景、机器人复位到初始状态 | 单击“开始”可再次开始 | ● | ● | × |
 |
编辑程序 | 在仿真时编辑控制程序,返回仿真后使用修改过的控制程序 | 停止或复位后可用 | ● | ● | × |
 |
编辑机器人 | 在仿真时编辑机器人,返回仿真后使用修改过的机器人 | 停止或复位后可用 | ● | ● | × |
 |
编辑场景 | 在仿真时编辑场景,返回仿真后使用修改过的场景 但规则脚本的修改在重新进入仿真时有效 |
停止或复位后可用 离线时官方作品不可编辑 |
◎ | × | × |
 |
拍照 | 对当前仿真窗口进行拍照 保存在程序安装目录的DriverTemp目录中 |
说明 | ● | ● | ● |
 |
变换视角 | 仿真视角在第一人称和第三人称之间切换 | 说明 | ● | ● | ● |
 |
设置方位 | 在仿真开始之前设置机器人的方位和朝向 | 未开始或复位后可用 | ● | ● | × |
● 表示此功能在某种模式下可用;◎ 表示此功能在某种模式下满足一定条件时可用;× 表示此功能在某种模式下不可用;
变换视角
仿真时单击“变换视角”可在第一人称和第三人称之间进行切换。第一人称类似射击游戏的效果,第三人称类似RPG游戏的效果。
第一人称时,视角跟随机器人运动,可进行如下调整:
●跟随距离:滚动鼠标滚轮,调整与机器人之间的距离;
●视角角度:第一人称时,默认的角度为机器人正后方。在仿真窗口中,按住鼠标右键进行左/右拖动,可360°调整视角角度。
第三人称时,视角不会跟随机器人运动,由用户自行调整:
●视角缩放:上、下滚动鼠标滚轮,进行视角范围的缩放。使用鼠标缩放时,缩放速率与鼠标指针指向的模型与视角相机的距离相关,距离越远缩放速率越快,距离越近缩放速率越慢。
●转动视角:在仿真区域按住鼠标右键进行上、下、左、右拖动,可转动视角。
●平移视角:按键盘上的“W”、“S”、“A”和“D”键,可上、下、左、右平移视角。
在任何人称时,都可在小地图上单击,切换到第三人称府视视角。
仿真与任务时间
“仿真时间”显示进入仿真的时间,在第一次开始仿真时开始计时,此时间在仿真期间不会随着仿真的暂停、停止而停止。
“任务时间”显示每次仿真的时间,在每次仿真开始时计时,与仿真控制同步暂停、停止和复位。仿真任务一般情况下都有时间限制,“任务时间”显示了仿真时经过的时间。当“任务时间”到达任务的时间限制时,任务自动结束,显示结果画面。
机器人参数
“机器人参数”(见图 2)实时显示仿真时机器人上各部件的参数,如直流电机的速度、伺服电机的角度、传感器的返回值等。
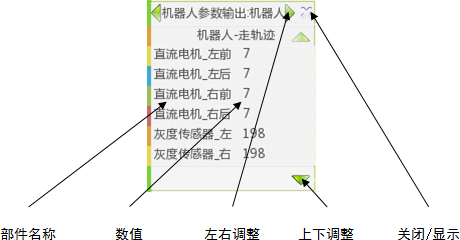
部件名称:显示构建机器人时的部件名称;
数值:显示各部件的实时数值;
左右/上下调整:调整显示画面,查看更多内容;
关闭/显示:在关闭和显示机器人参数画面之间切换;
机器人参数与控制程序的设置不一定相同,与机器人在仿真时的物理环境相关。
任务小地图
“任务小地图”(见图 3)显示了机器人在任务场景中的位置和朝向(沿Y轴),及视角相机的位置和朝向(沿Y轴)。
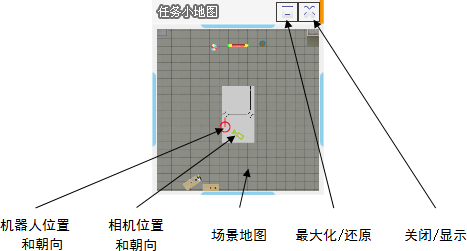
机器人位置和朝向:显示机器人在场景上垂直投影的位置和朝向。红色圆圈指示机器人的位置,圆圈上的直线指示其沿Y轴的朝向;
相机位置和朝向:显示视角相机在场景上垂直投影的位置和朝向。绿色相机图标指示相机的位置及其沿Y轴的朝向;
场景地图:显示任务场景中“相机限制”模型拍摄的场景画面;
最大化/还原:单击时,小地图在最大化和原始大小画面之间切换;
关闭/显示:单击时,小地图在关闭和显示之间切换;
控制程序窗口
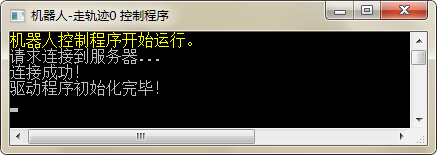
“控制程序窗口”(见图 4)在运行时在仿真窗口的下方显示其窗口,如所示,程序窗口中显示了程序运行的状态。窗口中还会显示使用控制程序中“打印数据”模块打印的内容。
此窗口请勿关闭,关闭后控制程序将停止运行。
仿真时编辑
离线仿真或在线单人仿真时,在仿真中可直接编辑选择的机器人和控制程序。离线仿真使用“我的作品”中的任务场景时,可以编辑任务场景。
在仿真中未开始仿真,或开始仿真后单击仿真控制栏中的“停止”或“复位”后,可选择单击“编辑程序”、“编辑机器人”、“编辑场景”进入相应的编辑器。编辑完后单击编辑器右上角的“×”返回到仿真。
从编辑器返回到仿真时,仿真均处于复位状态,以便重新加载任务场景、机器人和控制程序。
在仿真中进入编辑器后,如图 5所示进入机器人编辑器,在编辑区上显示“仿真时间”和“可编辑次数”,“文件”菜单中仅“保存”可用,其它功能与普通的编辑器一致。
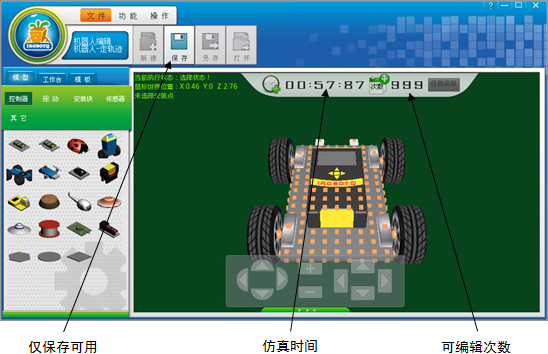
仿真时间:与仿真窗口中的仿真时间保持一致;
可编辑次数:某些任务会限制可编辑次数,此数值显示了剩余的编辑次数。在仿真中进入编辑器,对“机器人”或“控制程序”做出过修改并保存过,在返回到仿真窗口时,编辑次数计1次。
对于机器人有某些限制的任务中,在仿真中编辑机器人时,当机器人某些数据超出限制时,保存时会提示警告,并显示不符合规则要求的内容。应当按照提示修改机器人,使之符合要求时再保存。
离线模式下使用“我的作品”中任务场景,在仿真时可编辑此任务场景。对于场景模型的修改,在返回到仿真时会立即生效;对于场景中“任务配置”模型、“编辑脚本”的修改需要完全退出仿真,重新进入仿真后才生效。
结束仿真
仿真的结束有以下几种方式,仿真结束后退出时返回离线或在线模式主窗口。任务成功
任务成功后,仿真窗口显示结果画面,如图 6。画面显示了与任务得分、用时和任务相关的数据,在线任务会显示获得的积分,在线多人任务时,结果画面中的“序号”项显示排名。单击“我知道了!”,或单击仿真窗口右上角的“×”退出仿真。

任务失败
任务失败有2种情况
●机器人未按要求进行任务导致任务失败(如机器人脱离轨迹线),“任务消息”会显示失败的原因,并提示可以复位后重新开始。
●任务超时失败时显示任务失败画面,画面上显示了得分0,用时和任务相关的数据。单击“我知道了!”或仿真窗口右上角的“×”退出仿真。
手动关闭
仿真过程中单击仿真窗口右上角的“×”可随时退出仿真,退出仿真时没有成绩。